1. 问题现象
我们策划在配置技能的时候,当技能方向趋向于y轴方向的时候,发现技能方向总是有一定的偏差,进行细节调整的时候,也达不到效果,一直微调,微调到一定大小后,方向会突然偏向于另一边。如下图:
在趋向于x轴的时候,策划发现一直有4.69度想右边的偏差。进行微调也不会发生变化,直到微调到大约偏向于左边的时候,左边偏差却来到了3.79度。
也就是说有3.79+4.69=8.48度的角度,策划是指向的。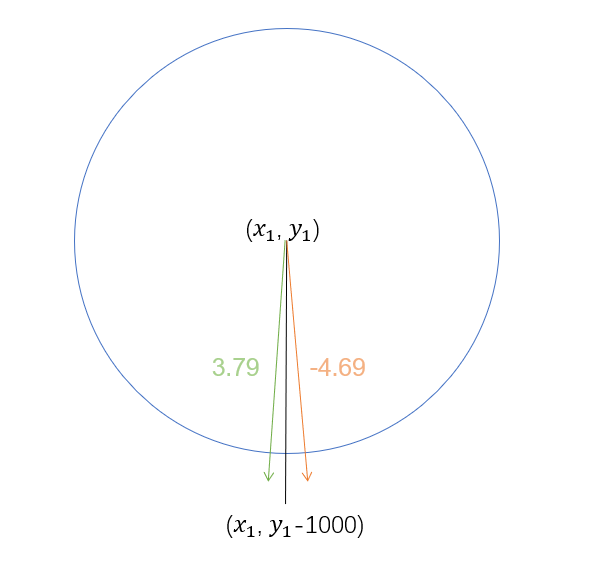
2. 排查问题
策划配置的角度是怪物站在(x1, y1)的位置,然后怪物技能的朝向目标坐标是(x1, y1-1000)的位置。策划进行微调的时候,是对目标坐标的x轴的值进行微调,发现无法调到想要的方向。
游戏内的实现逻辑是,释放技能的时候,把怪物转到设定方向。原本怪物的方向是(0, 1),虽然已经是策划需要的方向,但是此时也是会进行转向的运算。需要转到的目标方向也是(0, 1)。此时只要运算出怪物需要转向的角度为0即可。但事实是怪物转向逆时针转向了4.69度。
排查发现,计算转向的函数返回了这4.69度,进一步排查发现快速反平方根函数 fast_inv_sqrt 返回的值是有一定误差的。在运行 fast_inv_sqrt(1.0f) 的时候,返回的是0.998323,虽然已经很接近1了,但是仍然是有误差的。就是这小小的0.002左右的误差,最终计算角度的时候出现了4.69度的误差。
关于快速反平方根算法,我在之前的文章有解读过,可以查看 解读快速反平方根算法
3. 验证误差
下面代码是三种求反平方根的结果。调用math.h库的sqrt函数进行运算是没有误差的。
快速反平方根有牛顿迭代进行修正,一次迭代的时候,结果是0.998323,进行两次牛顿迭代的时候,数值会更加精确,来到了0.999996,小数点比一次迭代多精确3位数。
1 | double normal_inv_sqrt(double x) |
输出结果:
1 | normal_inv_sqrt 1.000000 |
4. 快速反平方根运算过程
double 类型的数据中符号位占用 1 位,指数占用 11 位,尾数占用 52 位。
那么double表示1.0f,用64位表示就是
1 | 1位符号位 11位指数 52位指数 |
转成long long类型,数值就是:2^62 - 2^52 = 4,607,182,418,800,017,408
转成目标值的整型:Ly=(3/2)2^52(1023-μ) - 1/2*Lx
1 | Ly = (3/2)*2^52*(1023-μ) - 1/2*Lx |
1 | 1位符号位 11位指数 52位指数 |
结果0.966是尚未进行牛顿迭代的结果,误差要大的多,进行一次迭代之后,数值是0.998323,进行两次迭代之后是0.999996。
5. 角度误差对比
虽然快速快速反平方根运算计算1的时候,误差在0.002,看起来也不是很大。但是在运算角度的时候,会放大这个误差,误差。特别是在角度-10度到10度,170度到190度之间。
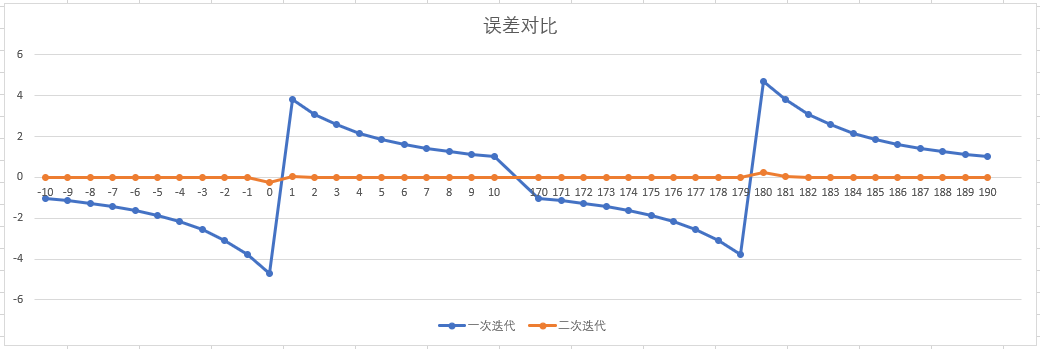
一次迭代 vs 两次迭代 的误差
| 转向角度 | 一次迭代 | 二次迭代 |
|---|---|---|
| -10 | -1.03602 | -0.00275 |
| -9 | -1.14083 | -0.00306 |
| -8 | -1.26681 | -0.00341 |
| -7 | -1.42067 | -0.00392 |
| -6 | -1.61165 | -0.00464 |
| -5 | -1.85288 | -0.00556 |
| -4 | -2.16291 | -0.00695 |
| -3 | -2.56751 | -0.00925 |
| -2 | -3.09991 | -0.01385 |
| -1 | -3.79752 | -0.02741 |
| 0 | -4.69231 | -0.23573 |
| 1 | 3.797516 | 0.027412 |
| 2 | 3.099911 | 0.013848 |
| 3 | 2.567509 | 0.009251 |
| 4 | 2.162912 | 0.006946 |
| 5 | 1.852875 | 0.005561 |
| 6 | 1.611654 | 0.004638 |
| 7 | 1.420678 | 0.003922 |
| 8 | 1.26681 | 0.003411 |
| 9 | 1.140832 | 0.003056 |
| 10 | 1.036024 | 0.002753 |
| 170 | -1.03599 | -0.00273 |
| 171 | -1.14081 | -0.00303 |
| 172 | -1.26684 | -0.00344 |
| 173 | -1.42067 | -0.00392 |
| 174 | -1.61162 | -0.00462 |
| 175 | -1.85288 | -0.00556 |
| 176 | -2.16292 | -0.00694 |
| 177 | -2.56751 | -0.00925 |
| 178 | -3.09991 | -0.01384 |
| 179 | -3.79752 | -0.02742 |
| 180 | 4.692313 | 0.235737 |
| 181 | 3.797517 | 0.027416 |
| 182 | 3.099909 | 0.013838 |
| 183 | 2.567509 | 0.009248 |
| 184 | 2.16293 | 0.006953 |
| 185 | 1.852853 | 0.005532 |
| 186 | 1.611652 | 0.004645 |
| 187 | 1.420666 | 0.003921 |
| 188 | 1.266836 | 0.003442 |
| 189 | 1.140806 | 0.003033 |
| 190 | 1.03603 | 0.002759 |
- 一次迭代里面,误差超过1度的在-10到10度,170到190度之间。
- 在0度和180度达到了最大误差值,分别是-4.69度和4.69度。
- 在0度到1度偏转的差值,来到了-4.69-3.79=-8.48度,将近10度了,也就是说有这10度,策划怎么调都调不到这个方向的。
- 两次迭代之后,数据要好得多,最大误差只有0.23度,这个数值玩家已经很难观察到了。
6. 修复方法
修复问题有三种:
- 第一种:在角度趋向于x轴,y轴的四个方向的时候,写死结果;
- 第二种:把快速反平方根函数修改为
1/sqrt(x),这样结果是没有误差的; - 第三种:在快速反平方根中,把结果进行两次牛顿迭代,提高精度。
第一种可以解决部分情况,但是如果策划需要有偏差的时候,会把结果修改为没有偏差,会引入新的问题。第二种结果是最好的,但是不知道sqrt函数的内容,无法预估带来的内存影响,而且快速反平方根函数已经运行了多年。最后选了第三种,提高的精度已经完全足够使用了。